0x4. Recognizing C code constructs in Asm
بسم الله الرحمن الرحيم.
دائماً في بداية رحلة أي شخص عند التعامل مع لغة Assembly، يشعر بصعوبة كونها لغة Low-Level على عكس اللغات الأخرى كـ C أو Python. سنحاول في هذا المقال تبسيط أكواد الأسمبلي لكي نتمكن من فهمها بشكل أكبر إن شاء الله.
فكرة المقال هي أننا سنكتب كوداً بسيطاً بلغة C ونقوم بعمل Compile له ليصبح x86 Assembly، ثم نشرح الخطوات التي تحدث لنتمكن من تحليل الـ Control Flow.
قبل البدء، إن لم يكن لديك علم كافي بـ لغة C و Assembly أنصحك بمراجعة السلاسل التالية: 🔗 سلسلة لغة C على شبكة شل 🔗 سلسلة لفة Asm على شبكة شل
1. Global vs Local Variables
1
2
3
4
5
6
7
int x = 1;
int y = 2;
void main() {
x = x + y;
printf("Total = %d\n", x);
}
ونقوم بعمل compile بالأمر التالي:
1
gcc -S -masm=intel -m32 -O0 filename.c -o filename.s
وعندما نقوم بفتح الملف الذي لاحقته .s يظهر التالي:
x86 Assembly:
00401003 mov eax, dword_40CF60
00401008 add eax, dword_40C000
0040100E mov dword_40CF60, eax ; [1] تخزين النتيجة
00401013 mov ecx, dword_40CF60
00401019 push ecx
0040101A push offset aTotalD ; "total = %d\n"
0040101F call printf
الـ global variables في الأسمبلي تكون عبارة عن عناوين ذاكرة (Memory Addresses) مثل: dword_40CF60.
Local Variables
بالنسبة للـ Local Variables، فتكون عبارة عن إزاحة (Offset) معين عن الـ ebp أو الـ esp أو أي ريجستر آخر (مثل: dword ptr [ebp-4]). عندما نقوم باستخدام disassembler مثل IDA Pro (والذي سنشرحه بالتفصيل في قادم المقالات بإذن الله)، ستظهر المتغيرات المحلية بوضوح.
1
2
3
4
5
6
7
void main()
{
int x = 1;Recognizing C Code Constructs in Assembly 111
int y = 2;
x = x+y;
printf("Total = %d\n", x);
}
x86 Assembly:
00401006 mov dword ptr [ebp-4], 0 ; [1]
0040100D mov dword ptr [ebp-8], 1 ; [2]
00401014 mov eax, [ebp-4]
00401017 add eax, [ebp-8]
0040101A mov [ebp-4], eax
0040101D mov ecx, [ebp-4]
00401020 push ecx
00401021 push offset aTotalD ; "total = %d\n"
00401026 call printf
عندما نقوم باستخدام disassembler كـ
idaوالي بقادم المقالات رح نشرح عنه باذن الله هيك بيظهر الـlocal variables.
00401006 mov [ebp+var_4], 0 ; [1]
0040100D mov [ebp+var_8], 1 ; [2]
00401014 mov eax, [ebp+var_4]
00401017 add eax, [ebp+var_8]
0040101A mov [ebp+var_4], eax
0040101D mov ecx, [ebp+var_4]
00401020 push ecx
00401021 push offset aTotalD ; "total = %d\n"
00401026 call printf
2. If Statement
1
2
3
4
5
6
7
8
int x = 1;
int y = 2;
if(x == y) {
printf("x equals y.\n");
} else {
printf("x is not equal to y.\n");
}
x86 Assembly:
00401006 mov [ebp+var_8], 1
0040100D mov [ebp+var_4], 2
00401014 mov eax, [ebp+var_8]
00401017 cmp eax, [ebp+var_4] ; [1] تعليمة المقارنة
0040101A jnz short loc_40102B ; [2] قفز مشروط إلى else
0040101C push offset aXEqualsY_ ; "x equals y.\n"
00401021 call printf
00401026 add esp, 4
00401029 jmp short loc_401038 ; [3] قفز غير مشروط لتخطي else
0040102B loc_40102B: ; قسم else
0040102B push offset aXIsNotEqualToY ; "x is not equal to y.\n"
00401030 call printf
أول شيء سنواجهه هو تعليمة CMP، بعدها يكون هناك قفز مشروط. (إذا تم القفز المشروط، يكون الكود قد أخذ مسار else). وإذا لم يُنفذ، يكمل الكود وينفذ قفزاً غير مشروط وهو مسار if الأساسي.
3. For Loop
1
2
3
4
int i;
for(i = 0; i < 100; i++) {
printf("i equals %d\n", i);
}
x86 Assembly:
00401004 mov [ebp+var_4], 0 ; [1] التهيئة (i=0)
0040100B jmp short loc_401016 ; [2] قفز للمقارنة
0040100D loc_40100D: ; منطقة التحديث (Update)
0040100D mov eax, [ebp+var_4] ; [3]
00401010 add eax, 1 ; زيادة العداد
00401013 mov [ebp+var_4], eax ; [4]
00401016 loc_401016: ; منطقة المقارنة (Condition)
00401016 cmp [ebp+var_4], 64h ; [5] 64h = 100
0040101A jge short loc_40102F ; [6] قفز مشروط للخروج من الحلقة
0040101C mov ecx, [ebp+var_4] ; محتوى الحلقة
0040101F push ecx
00401020 push offset aID ; "i equals %d\n"
00401025 call printf
0040102A add esp, 8
0040102D jmp short loc_40100D ; [7] العودة للتحديث
- يتم التهيئة بمتغير محلي داخل الـ for.
- نرى قفزاً غير مشروط يأخذنا للمقارنة
CMP. - بعدها قفز مشروط للخروج. إذا لم يتم الخروج، تُنفذ التعليمات داخل الـ for.
- في النهاية، قفز غير مشروط يأخذنا لمكان التحديث (
incrementأوdecrement). - تتكرر العملية حتى يتحقق شرط الخروج.
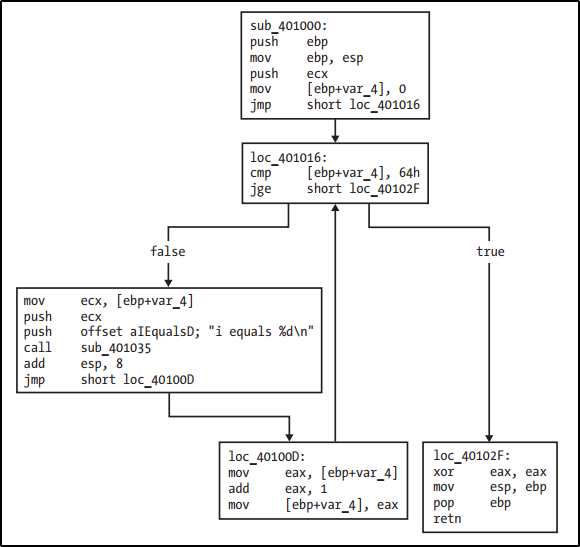 شكل (1): مقتطف من برنامج IDA Pro.
شكل (1): مقتطف من برنامج IDA Pro.
4. While Loop
1
2
3
4
5
6
7
int status = 0;
int result = 0;
while(status == 0) {
result = performAction();
status = checkResult(result);
}
x86 Assembly:
00401036 mov [ebp+var_4], 0
0040103D mov [ebp+var_8], 0
00401044 loc_401044: ; بداية الحلقة
00401044 cmp [ebp+var_4], 0 ; المقارنة
00401048 jnz short loc_401063 ; [1] قفز مشروط للخروج
0040104A call performAction
0040104F mov [ebp+var_8], eax
00401052 mov eax, [ebp+var_8]
00401055 push eax
00401056 call checkResult
0040105B add esp, 4
0040105E mov [ebp+var_4], eax ; تحديث الحالة
00401061 jmp short loc_401044 ; [2] العودة لبداية الحلقة
شبيهاً بالـ for ولكن أسهل بعض الشيء. البداية تكون بمقارنة CMP يليها قفز مشروط للخروج من الـ while. إذا لم ينفذ القفز، يُنفذ الكود داخل الحلقة، وفي نهايته قفز غير مشروط لإعادة الدورة. وهكذا حتى يتحقق شرط الـ CMP ويقفز خارجها وينتهي الـ loop.
5. Switch Statement
ممكن أن يتم تجميع الـ Switch بطريقتين بناءً على المجمع (Compiler):
الطريقة الأولى: If Style
تكون مشابهة تقريباً للـ if المتسلسلة. نرى عدد مقارنات مساوٍ لعدد الحالات، وبعد كل مقارنة قفز مشروط لتنفيذ الأمر. وفي النهاية قفز غير مشروط للـ default.
1
2
3
4
5
6
switch(i) {
case 1: printf("i = %d", i+1); break;
case 2: printf("i = %d", i+2); break;
case 3: printf("i = %d", i+3); break;
default: break;
}
x86 Assembly:
00401013 cmp [ebp+var_8], 1
00401017 jz short loc_401027 ; [1] Case 1
00401019 cmp [ebp+var_8], 2
0040101D jz short loc_40103D ; Case 2
0040101F cmp [ebp+var_8], 3
00401023 jz short loc_401053 ; Case 3
00401025 jmp short loc_401067 ; [2] Default
00401027 loc_401027: ; تنفيذ Case 1
00401027 mov ecx, [ebp+var_4] ; [3]
0040102A add ecx, 1
; ... (بقية التعليمات) ...
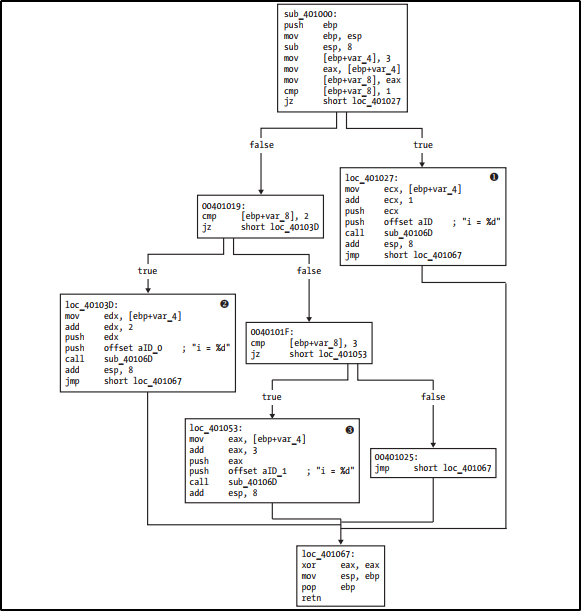 شكل (2): مقتطف من برنامج IDA Pro.
شكل (2): مقتطف من برنامج IDA Pro.
1
2
3
4
5
6
7
switch(i) {
case 1: printf("i = %d", i+1); break;
case 2: printf("i = %d", i+2); break;
case 3: printf("i = %d", i+3); break;
case 4: printf("i = %d", i+3); break;
default: break;
}
x86 Assembly:
00401016 sub ecx, 1 ; طرح 1 لأن الكومبايلر يبدأ من 0
00401019 mov [ebp+var_8], ecx
0040101C cmp [ebp+var_8], 3 ; مقارنة بالحد الأقصى
00401020 ja short loc_401082 ; إذا تجاوز الحد، اذهب للـ default
00401022 mov edx, [ebp+var_8]
00401025 jmp ds:off_401088[edx*4] ; [1] القفز المباشر عبر الجدول
; --- العناوين المستهدفة ---
0040102C loc_40102C:
; ...
00401042 loc_401042:
; ...
00401082 loc_401082: ; النهاية (Default/Exit)
00401082 xor eax, eax
00401087 retn
; --- جدول القفز ---
00401088 off_401088: ; [2]
00401088 dd offset loc_40102C
0040108C dd offset loc_401042
00401090 dd offset loc_401058
00401094 dd offset loc_40106E
طريقة جدول القفز تعتمد على طرح قيمة للحصول على index يبدأ من الصفر، ثم مقارنة مع عدد المتغيرات، وإذا كان ضمن النطاق يتم القفز مباشرة باستخدام الجدول بناءً على المعادلة [edx*4]. واذا لم يكن ضمن النطاق ينفذ فورا الـ default.
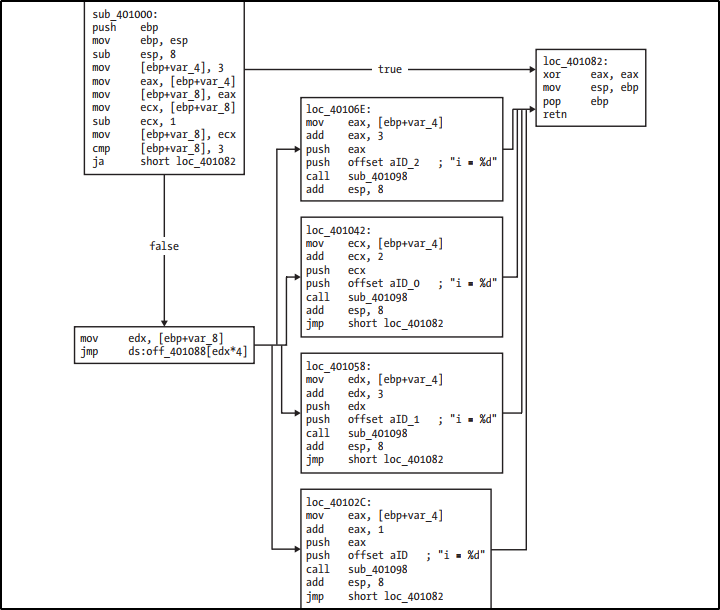 شكل (3): مقتطف من برنامج IDA Pro.
شكل (3): مقتطف من برنامج IDA Pro.
6. Arrays
1
2
3
4
5
6
7
8
9
10
int b[5] = {123, 87, 487, 7, 978};
void main() {
int i;
int a[5];
for(i = 0; i < 5; i++) {
a[i] = i;
b[i] = i;
}
}
x86 Assembly:
00401021 mov edx, [ebp+var_18]
00401024 mov [ebp+ecx*4+var_14], edx ; [1] Local Array
00401028 mov eax, [ebp+var_18]
0040102B mov ecx, [ebp+var_18]
0040102E mov dword_40A000[ecx*4], eax ; [2] Global Array
الـ Memory Address الخاص بالمصفوفة يعتمد على تعريفها (Global أم Local). ويرافقها دائماً Register يعمل كـ Index مضروب بحجم عناصرها. (مثلاً: مصفوفة Integers يكون الـ Index مضروباً بـ 4 [ecx * 4]). مع التركيز على انه يتم طرح 1 من عدد العناصر لأن الكومبايلر يبدأ من 0.
7. Structs & Linked Lists
Struct
1
2
3
4
5
6
7
8
9
10
11
12
struct my_structure { ; [1]
int x[5];
char y;
double z;
};
struct my_structure *gms; ; [2]
void main() {
gms = (struct my_structure *) malloc(sizeof(struct my_structure));
test(gms);
}
x86 Assembly:
00401053 push 20h ; حجم الـ Struct (32 bytes)
00401055 call malloc
0040105A add esp, 4
0040105D mov dword_40EA30, eax ; تخزين العنوان الأساسي
00401062 mov eax, dword_40EA30
00401067 push eax ; [1] تمرير المؤشر للدالة
00401068 call sub_401000
يتم تعريف الـ struct كـ متغير ويتم إضافة القيم الي جواه على حسب المتغيرات التي يحتويها وحسب استدعاء الدالة. عند تعريف الـ struct وحجز مساحة له بـ malloc، يعطينا العنوان الأساسي (Base Address) الذي هو بداية الـ struct.
Linked List
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
struct node {
int x;
struct node * next;
};
typedef struct node pnode;
void main() {
pnode * curr, * head;
int i;
head = NULL;
for(i=1; i<=10; i++) { ; [1] بناء الـ Nodes
curr = (pnode *)malloc(sizeof(pnode));
curr->x = i;
curr->next = head;
head = curr;
}
curr = head;
while(curr) { ; [2] التنقل بين الـ Nodes
printf("%d\n", curr->x);
curr = curr->next;
}
}
x86 Assembly:
0040107E mov [esp+18h+var_18], 8 ; حجم الـ Node
00401085 call malloc
0040108A mov [ebp+var_4], eax ; eax يحمل عنوان الـ Node الجديد
0040108D mov edx, [ebp+var_4]
00401090 mov eax, [ebp+var_C]
00401093 mov [edx], eax ; [1] curr->x = i
00401095 mov edx, [ebp+var_4]
00401098 mov eax, [ebp+var_8]
0040109B mov [edx+4], eax ; [2] curr->next = head
0040109E mov eax, [ebp+var_4]
004010A1 mov [ebp+var_8], eax ; head = curr
الفرق الجوهري بين الـ struct العادي والـ Linked List في الأسمبلي هو كثرة عمليات mov التي تدل على تكوين الروابط (Links) بين الـ Nodes كما يظهر في الأسطر المعلمة بـ [1] و [2].